2011年夏:「J-PARCリニアックチョッパー空洞の検討」レポートへのコメント
○ J-PARCリニアックのRFチョッパー空洞の検討レポートをいただいたので、コメントする。
当初のRFチョッパーは、偏向電場の強度を稼ぐために、単一空洞を2台ビーム軸上に並べ、高周波的にはシリーズにつなげて、1台の高周波電源でドライブする方式であった。
この空洞の持つ問題点を改善するための二つの方法を2005年のNIM論文の末尾に提案しているので、引用する。
we propose the following two methods:
firstly, the anti-chopper system can eliminate all of the transient part of the chopped beam theoretically [9], and
secondly, each RFD cavity can be independently powered with an rf source of 36kW,
so that the two demerits of the coupled RFD system, the longer rise time and the longer delay time in the second RFD, can be eliminated, and the much shorter rise time can be achieved.
第一はanti-chopper systemを付け加えれば、不十分に蹴られたバンチを全て元の軌道に戻す事が出来る。
第二は、二つの空洞を独立した二つの高周波電源でドライブすれば、連結空洞が持つ欠点を改良できる。
欠点とは、二番目の空洞の、より長めの立ち上がり時間と、より長めの遅延時間、そして高周波ミスマッチによる余計な(実害はないが)反射波部分である。
最初に、RFチョッパーシステムの特徴について述べておこう。
- 非常に早い立ち上がり時間が求められる機器に高周波空洞を選択する事は普通はしない。その理由は、空洞にはQ値によって決まる立ち上がり固有時間があり、この空洞固有の立ち上がり固有時間が邪魔をして、「早い」立ち上がり時間を得る事が難しいからである。
- 一方、空洞がQ値を持てば、それに応じて空洞内部の電磁場が倍増されるという利点もある。そこで、J-PARCリニアックに使われるチョッパーに求められる特性をよく考えてみると、この場合、強い電場を使って、とにかくビームを蹴り出せばいいという事がわかる。即ち、どの角度に正確に蹴り出すという事は必要ない。これが、通常のビーム輸送路内で使われるビーム偏向用空洞との大きな差である。勿論、蹴り出されたバンチの受け皿はそれなりに考慮する必要がある。
- 従って、この場合のRFチョッパーシステムに必要な早い立ち上がり時間とは、空洞のQ値により決まる立ち上がり固有時間ではなく、ビームを蹴り出すのに必要な電場に到達するまでの立ち上がり時間である事がわかる。言い換えれば、Q値が少しばかり大きくて立ち上がり固有時間が長くても、外部高周波電源の大きな出力でドライブすれば、いくらでも、必要な電場レベルまでの到達時間を短くする事ができる。
- 念の為、付言すると、電場を強くしても安定運転が可能なのは、一つには、空洞内の電場が放電レベルに比べて低いので、十分余裕がある事、第二に、半導体高周波電力増幅器は小電力モジュール出力をパッシブな素子でまとめて出力する構造なので、高電圧放電の危険が少なく、安定に運転可能な事に負うている。
- 従って、RFチョッパーシステムの立ち上がり性能(システム全体の性能として決まる立ち上がり時間)を考える時には、ドライブ電力まで含めて立ち上がり時間を考えなければ、システムとしての性能を偏って評価する結果となる。
- 当初製作したチョッパーシステムでビームを蹴り出す為に必要な電場は1.6 MV/m、当初計算された高周波電力は18kWであった。一方、実際に製作した高周波電源の最大運転出力は36kWである。バンチ半幅が35度程度(デザイン当時の正確な資料が手元にないので仮定する)のバンチをけり出す場合を考えると、36kWドライブに比べて、18kWドライブにより得られる立ち上がり時間は、およそ1.6倍になる。従って、RFチョッパーで早い立ち上がりを目指す場合には、可能な限り大きな電力でドライブする事が重要となる。
このように、RFチョッパーを、電源まで組み入れたシステムとして製作した故に、現実問題として、連結空洞の2番目の空洞が持つ時間の遅れという二つの欠点は、ほとんどビーム実験には反映されていなかった。これは、デザイン電場よりも強い電場を使用した結果と思われる。下図は2002年にKEKで行われた
チョッパービーム試験 の時に、得られたビーム波形である。仮に、J-PARCリニアックでこの程度の立ち上がりを持つチョップパルス波形が見られないとすれば、現在のチャッパーシステムは、何らかの理由により持てる性能を十分発揮していないといえるので、更なる改善を目指したRFチョッパーシステムのチューニングとビームスタディが必要だろう。
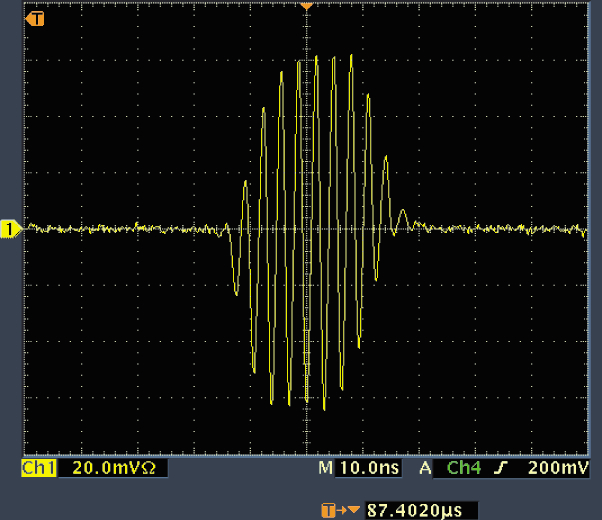
図1:2002年にKEKで行われたビームテストにおいて、リニアックMEBTのビーム位置モニターにより測定されたチョップビーム信号。過渡状態部分は、324MHzのマイクロバンチ3個分程度(~10nsec)。ピーク電流24mA、10nsec/div、チョップ周波数2MHz、チョッパー励振電力36kW。本図は過渡部分のチューニングのために、チョップビーム幅を次第に短くする事により、実現しているので、山の数は少ないが定常状態に達している事は確認している。なお、この図では、高周波電力パルスの立ち下がり寸前で、位相反転を行い、2バンチ程の改善効果を得ている。
本題に入る。RFチョッパーは、空洞に問題点を抱えていたので、それを改良する試みは是とすべきであるが、いただいた公表レポートには、いくつかの疑問点を感じたので、ここに検討結果を示す。
下に引用するのは、まとめの部分の2ページである。
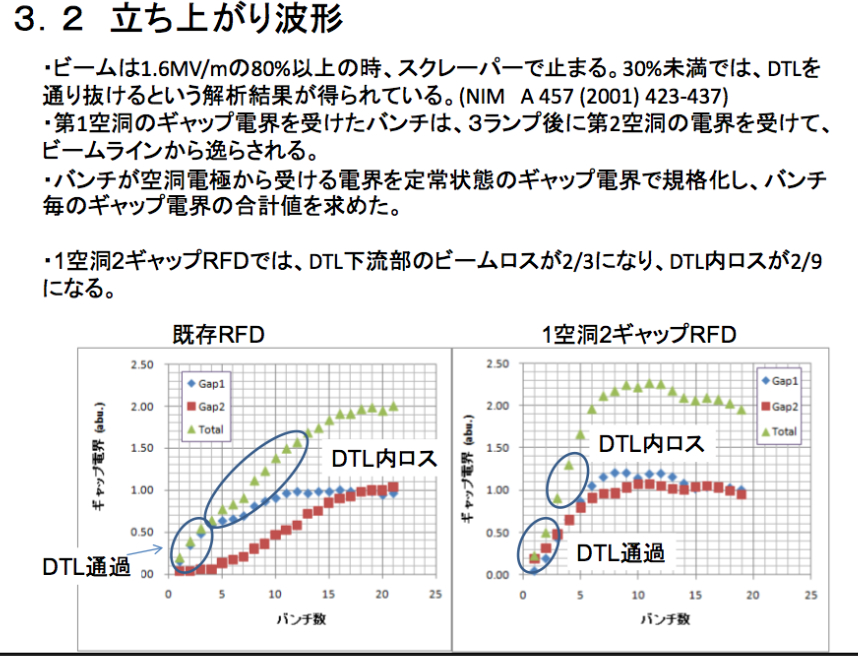
図2:J-PARCリニアックチョッパー検討レポートのまとめ部分からの引用(1)。左図はRFチョッパー動作の不十分な理解のもとで描かれており、実際の特性とはかけ離れたものである。図4の左図と比較するとその事が理解されよう。
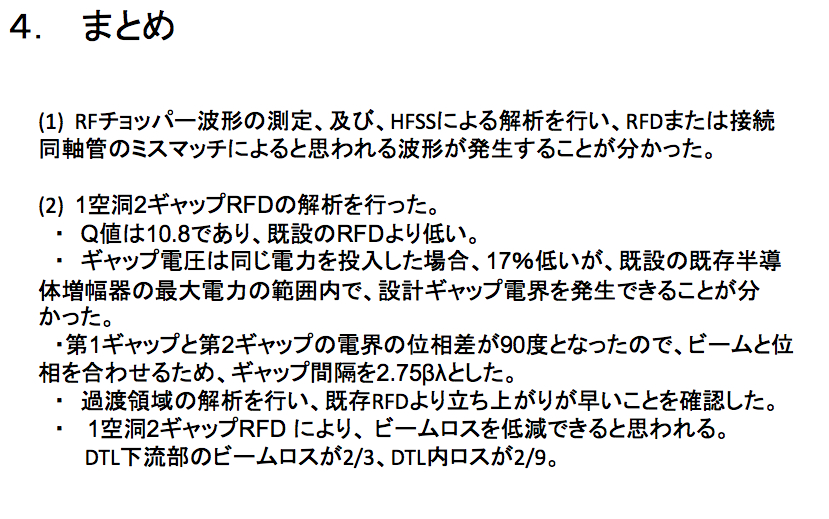
図3:J-PARCリニアックチョッパー検討レポートのまとめ部分からの引用(2)
検討結果を以下に述べる。
- まず、図1と図2内の左下図を比較する。図1から、昔の実験ではバンチ2〜3個の過渡状態をへて、定常状態のバンチとなる事がわかる。ところが、図2のシミュレーションでは、12個程度の過渡状態バンチが存在するとして、円で囲っている。この差はあまりに大きく、これでは、事実を適切にシミュレートしているとはいえない。既存のRFチョッパーシステムが電場1.6MV/mで不十分に稼働している状態を取り上げて、比較の対象としても、そのシステムの性能を論じている事にはならない。
- そのような比較結果から、1空洞2ギャップRFDにすれば、大幅にロスが減ると結論するのは、人に誤った理解を与える議論である(図2、3参照)。
- 当初からRFチョッパーシステムは、高周波大電力源と対になって、早い立ち上がり特性が得られるようにデザインされているので、ビームがある余裕をもってスクレーパーにぶつかるという目安であるデザイン電場を設定した上で、立ち上がり特性を論じる事には、何の意味もない。
- 更に、「ギャップ電圧は同じ電力を投入した場合、17%低いが、既設の既存半導 体増幅器の最大電力の範囲内で、設計ギャップ電界を発生できることが分かった。」という結論は、以下の問題を含んでいる。
- 同じ電力を投入した時に1空洞2ギャップRFDのギャップ電圧が17%低い(シャントインピーダンスが低い)という事は、立ち上がり時間で言えば、34%ほど遅くなるという意味である。高周波電力が最初に入る空洞の過渡状態の立ち上がりが、その程度遅れる事を意味するので、第二空洞への高周波電力が過渡状態において遅れる時間の間は、もろに効果があらわれる。
- 「既設の既存半導 体増幅器の最大電力の範囲内で、設計ギャップ電界を発生できることが分かった。」という記述は、このRFチョッパーシステムがどのようにして早い立ち上がりを達成するかという視点において、高周波電力が果たす役割を重視していない事を意味している。即ち、デザイン電場で働かせる事を仮定している。これでは、Q値で決まる遅い立ち上がり特性を持つ高周波空洞を選択したデメリットがもろにビームに反映されてしまう。
- 極限の早い立ち上がり性能を求めるならば、遅延時間が1/3程度になる1空洞2ギャップRFD空洞にするのではなく、2電源独立ドライブ方式+2空洞方式を選択して、遅延時間や空洞間の高周波ミスマッチ問題をゼロにする選択が優れている。
結論としては次のようになろう。
- 1空洞2ギャップRFDは、第2ギャップの過渡状態を改善しており、利点も認められるが、シャントインピーダンスが低くなり、立ち上がり時間が遅くなるという欠点が生まれる。
- 2空洞2ギャップRFDの第2空洞の過渡特性遅れは、高電力運転をすれば、ビームに実質的な影響を与えないという、いわば隠れた因子であり、重大な問題とするにはあたらない。
- 最良のチョッパー過渡特性を期待する場合には、1空洞2ギャップRFDにはハンディがある。2空洞2ギャップRFDは、2台の同性能の高周波電源で別々にドライブする事により、第2空洞の遅れをゼロにして、最良の動作を期待できる。その点、1空洞2ギャップRFDではそうした動作オプションが不可能であり、常に一定の遅れを伴う事になる。
- 従って、予算がある場合には、電源故障のオプションも考えて、2台目の高周波電源を作り、2空洞を独立にドライブするスキームが最良の選択であろう。
ここまで書き終えていた所、先に引用したレポートを、プロシーディング用の論文にまとめたものが送付されてきた。かつて作った縁もあるので、以下に引用するコメントを著者に送付した所、度々の意見交換を経て、図2の左に相当する図は、最終送付稿では次のように書き換えられた。ある機器の働きに対する考え方は人により色々あるもので、科学技術といえども唯一無二の結論にはなかなかならない。そうした中で、RFチョッパー性能に関する当初の考え方を理解していただいた点は評価できる。機器に対する理解の深さに対応して、これまでの研究内容を精査し、変更方針に対応できる技術レベルを、今後は適切な方向へ向って発揮すれば、色々な問題点の解決に至ると思われる。
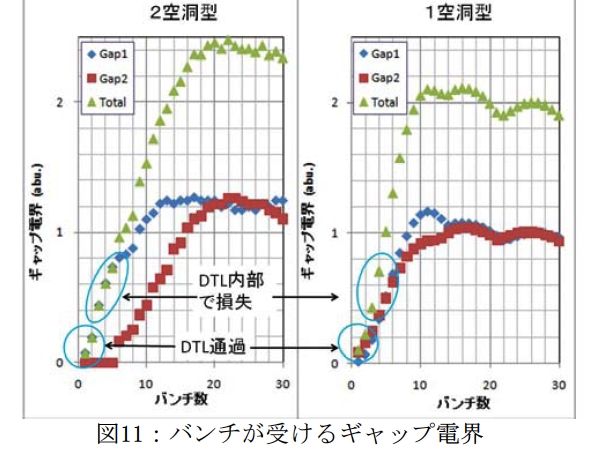
図4:最終送付稿の2空洞2ギャップRFDの過渡特性図(左図)。図2の修正版にあたる。右図の相対電場1.0が1.6MV/mに対応するとすれば、左の図では、夫々の空洞の相対電場は1.2に設定されているが、更に強くなって1.4程度になると、過去のデータからは推測できる。その場合には、左図の電場の立ち上がりは更に急峻になる。なお、過渡状態のビームロスの検討については、本稿では触れないが、単に、図のどのレベルだからどうだという程度の簡単な推定を行っていたわけではない。
以下は、筆者が論文の筆頭著者に送った最初のコメントメイルである。ここまで書いた内容とほぼ同様の附けたりなので、興味のない方はスキップ願います。
原稿送付、有難うございます。
きちんとした計算をされているようですが、ビームとの関連性については、多 少見解の相違があるようですので、かつて、チョッパーをどのように考えて作 り、2002年のKEKビームテストの結果はどのようであったかという事につい て、少しお知らせしたいと思います。なお、現在のチョッパーの運転状況は具 体的には知りませんので、2002年のビームテストで得られた知見に基づく見解 です。
内藤さんは、部分的にご存知と思います。
まず、私のこれまでの仕事を以下にまとめています。
(1)http://research.kek.jp/people/kato/ ホームページ
この中の、以下に2002年のチョッパビームテストの結果報告があります。これ は当時の関係者の皆様に配布しているものです。
(2)http://research.kek.jp/people/kato/ATO-jhfla-src/choppedmeasure3.pdf
2002.7.6 Rise and fall times of the chopped beam (3)
チョッパのJ-PARCでの運転状況に関連して、次のコメントをしています。
(3)http://research.kek.jp/people/kato/whatN/what005chopaccept.html
2007年8月26日(日)RFチョッパーの位相アクセプタンス
(2)の中に示されている図1のチョップビーム波形の立ち上がり下がりは、 波で4山程度です。このビームは、長いビームパルスを狭める事によって作っ ていますので、4山程度で定常状態といえると思います。位置モニターですか ら位置を確認している事にもなります。
2002年に得られたこの結果といただいた論文図11左図には大きな差が見える ように思われます。ビーム損失を考える時の出発点に大きな差があるように思 います。
チョッパーをデザインするときには次のように考えました。
チョッパーデザインの考え方:
非常に早い立ち上がり時間が求められる機器に高周波空洞を選択する事は普 通はしない。その理由は、空洞にはQ値によって決まる立ち上がり固有時間が あり、この空洞固有の立ち上がり固有時間が邪魔をして、「早い」立ち上がり 時間を得る事が難しいからである。
一方、空洞がQ値を持てば、それに応じて空洞内部の電磁場が倍増されると いう利点もある。そこで、J-PARCリニアックに使われるチョッパーに求められ る特性をよく考えてみると、この場合、強い電場を使って、とにかく早い立ち 上がりスピードを伴って、ビームを蹴り出せばいいという事がわかる。即ち、 どの角度に正確に蹴り出すという事は必要な条件ではない。これが、通常のビ ーム輸送路内で使われるビーム偏向用空洞との大きな差である。勿論、蹴り出 されたバンチの受け皿はそれなりに考慮する必要がある。
従って、この場合のRFチョッパーシステムに必要な早い立ち上がり時間と は、空洞のQ値により決まる立ち上がり固有時間ではなく、ビームを蹴り出す のに必要な電場に到達するまでの立ち上がり時間である事がわかる。言い換え れば、Q値が少しばかり大きくて立ち上がり固有時間が長くても、外部高周波 電源の大きな出力でドライブすれば、いくらでも、必要な電場レベルまでの到 達時間を短くする事ができる。
従って、RFチョッパーシステムの立ち上がり性能(システム全体の性能とし て決まる立ち上がり時間)を考える時には、ドライブ電力まで含めて立ち上が り時間を考えなければ、システムとしての性能を偏って評価する結果となる。
当初製作したチョッパーシステムでビームをスクレーパーまで蹴り出す為に 必要な電場は1.6 MV/m(この電場をデザイン電場と呼ぶ。早い立ち上がりを目 指す運転では、電源が許す限りの高い電場を選び、それが通常運転電場とな る)、当初計算された高周波電力は18kWであった。一方、実際に製作した高周 波電源の最大運転出力は36kWである。バンチ半幅が35度程度(デザイン当時の 古い資料が手元にないので仮定する)のバンチをけり出す場合を考えると、 36kWドライブに比べて、18kWドライブにより得られる立ち上がり時間は、およ そ1.6倍になる。従って、RFチョッパーで早い立ち上がりを目指す場合には、 可能な限り大きな電力でドライブする事が重要となる。
なお、NIM論文にある22kWというドライブ電力は、ある横エミッタンスを仮 定して、チョップビームと直進ビームのスクレイパー位置での分離距離が 4.4mmに開く場合のドライブ電力である。4.4mmというギャップは相当に大きな 値で、実際の運転の余裕をもたらす因子の一つとなる。
このように、RFチョッパーを、電源まで組み入れたシステムとして製作した 故に、現実問題として、連結空洞の2番目の空洞が持つ時間遅れという欠点 は、ほとんどビーム実験には反映されていなかったと思われます。実験で得ら れたチョップビームの過渡部分の短さがそれを表わしていると思います。これ はデザイン電場よりも強い電場を使用するという運転方法によるものと思いま す。
従って、既存のRFチョッパーシステムが電場1.6MV/mで不十分に稼働してい る状態を取り上げて、立ち上がり特性比較の対象としても、そのシステムの実 際の立ち上がり性能を論じている事にはならず、そのような比較結果から、1 空洞2ギャップRFDにすれば、大幅にロスが減ると結論するのは、人に誤解を 与えるのではないかと思います。
1空洞2ギャップRFDはシャントインピーダンスがかなり低くなるようにデ ザインされている故か、既存電源を使う場合には、デザイン電場までしか到達 できないようですので、立ち上がり特性はほとんど空洞系だけのQで決まって しまうでしょう。従って、より大きなRF電力によって、実質的に早い立ち上が りを得るという当初の狙いを実現する事は難しいと思います。KEKの実験では 1個の空洞だけをドライブしても、十分ビームが蹴り出せるというスタディ結 果を得ていますので(NIM論文参照)、第2空洞の寄与が少ない過渡部分の最 初部分は、第1空洞の立ち上がりだけで決まっていると思います。従って、 36kW で電場1.6MV/mまでしか到達できない空洞の場合は、立ち上がり過渡部分 はむしろ遅くなる場合もあるという結論かと思います。
仮に、現在のチョッパー運転がビーム損失を生んでいるというのであれば、 その運転状態をもう一度詳しくスタディする事が重要と思います。
なお、更に立ち上がりを改善したい場合に備えて、NIM論文の末尾に書いて おきましたが、次の方法がよいと思います。
極限の早い立ち上がり性能を求めるならば、遅延時間が1/3程度になる1空 洞2ギャップRFD空洞にするのではなく、2電源独立ドライブ方式+2空洞方 式を選択して、遅延時間や空洞間の高周波ミスマッチ問題をゼロにする選択が 優れている。
なお、Wang氏の業績と思いますが、2つのRFD空洞を連結した時に、第二空 洞に余分の遅れがある事、ミスマッチが有る場合には反射が起こり無用の定在 波が中間部にあらわれる事は既にNIM論文に記載してあり、Wang氏はHFSS計算 結果を参考にして其の部分のチューニングを行った事を書き添えておきます。
以上を参考にされて、良い研究報告を書かれますよう、期待しています。